- 更新:2020年04月27日
株式会社マップフォー
- プロダクト(製品)共同開発
- 共同研究
- リソース提供(既存技術の提供・特許流用の検討など)
- 販売パートナー募集(チャネル拡大・エンゲージメント向上)
- 事業提携
- プロジェクト・イベント型(期間限定)での協業
- ネットワーキング
- 大学発ベンチャー
プロジェクトメンバー
責任者

プランのアップグレードで企業責任者情報を確認いただけます
プラン詳細はこちら
自社特徴
○当社技術の特徴
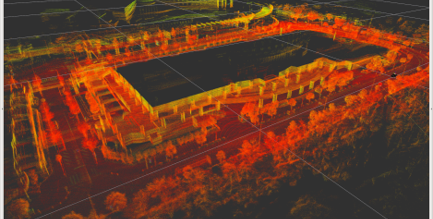
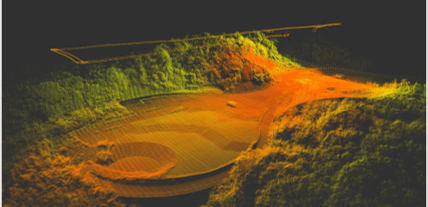
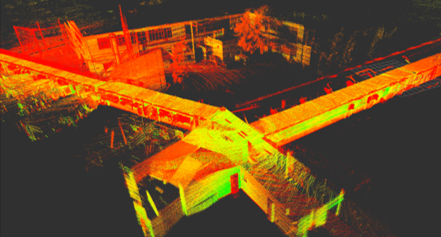
・LiDARデータを用いたSLAMによる3次元地図作成は、一般に精度と計算時間のトレードオフであり、自動運転に活用されうる精度の3次元地図を作成しようとすると、計算処理に時間が掛かっていた。我々は名古屋大学での研究成果を活用し、地図データの内部構造を逐次的に更新するアルゴリズムやIMUやカメラとのセンサフュージョンにより、精度を担保しつつ、高速な処理を実現した。また、このシステムは車両搭載LiDARだけでなく、バックパックやUAV計測といった、様々な取得方法のデータにも対応することができ、今後、車両の自動運転だけでなく、工場内の自動搬送ロボットや、農業、林業等、多岐に渡る分野で利活用されることが期待できる。
・GNSS/IMUといったセンサーを用いた、高精度な車両の位置推定を実現するには、一般には高価なシステムが必要であった。我々は、GNSSの測位情報だけでなく、Doppler情報も合わせて活用し、センサデータの補正や様々な位置姿勢推定アルゴリズムを組み込むことにより、安価なセンサーを用いた場合でも、高価なシステムに匹敵する性能を達成し、価格性能比を圧倒的に向上させた。今後、この位置推定技術を前述の1のSLAM技術と合わせて活用することにより、現在市場に出回っている計測システムの代替となるものが、1/10以下の価格で提供可能であると期待できる。
提供リソース
・3次元地図作成、自己位置推定、自動運転に関するソフトウェアの開発技術
こんな企業と出会いたい
ビジネス領域
- ソフトウェア・システム開発
企業情報
- 企業名
- 株式会社マップフォー
- 事業内容
- ・LiDARデータを用いたSLAMによる高精度3次元地図作成 ・GNSS/IMUセンサーを用いた、精度な車両の位置推定 ・3次元データの計測車両構築
- 所在地
- 愛知県名古屋市中村区名駅1-1-3 JRゲートタワー 27F 名古屋大学オープンイノベーション拠点 (OICX)
- 設立年
- 2016年
プランのアップグレードで企業情報をご確認頂けます
プラン詳細はこちら選択しているビジネス領域の企業
株式会社 Lightblue Technology
- プロダクト(製品)共同開発
- リソース提供(既存技術の提供・特許流用の検討など)
- 既存プロダクト改善(生産プロセス・製品性能・システム)
- 販売パートナー募集(チャネル拡大・エンゲージメント向上)
- 事業提携
- 資金調達したい
- ネットワーキング
- 中小企業
- 大学発ベンチャー
- スタートアップ
株式会社コーピー Corpy&Co., Inc.
- プロダクト(製品)共同開発
- 共同研究
- 事業提携
- プロジェクト・イベント型(期間限定)での協業
- 新市場の模索
- 大学発ベンチャー
- 3カ月以内の提携希望
- 海外ベンチャー
- スタートアップ